|
PointCloud2BIM Library
1.0
Library to facilitate the transpormation of point clouds into digital BIM representation
|
|
PointCloud2BIM Library
1.0
Library to facilitate the transpormation of point clouds into digital BIM representation
|
Set of functions supporting mathematic operations. More...
#include <algorithm>#include <cmath>#include <iostream>#include "BoundingBox.h"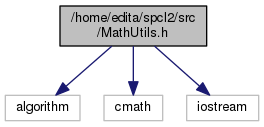
Functions | |
| double | det2 (double a1, double b1, double c1, double d1) |
| Calculates the determinant of the given 2x2 matrix. More... | |
| double | det3 (double matrix[3][3]) |
| Calculates the determinant of the given 3x3 matrix. More... | |
| void | eig3 (double matrix[3][3], double lambda, double(&result)[3]) |
| Calculates eigenvector of the given 3x3 matrix for the given eigenvalue. More... | |
| void | cubicEq (double au, double bu, double cu, double du, double(&result)[3]) |
Calculates the solution of a cubic equation (  ). More... ). More... | |
| template<typename T > | |
| void | averageD (std::vector< T > &points, double(&v1)[3], double(&averageD)) |
Calculates the average coefficient d for the plane (  ) given by normal vector and interpolated through the given points. More... ) given by normal vector and interpolated through the given points. More... | |
| template<typename T > | |
| void | planeFromPoints (std::vector< T > &points, std::vector< int > &indexes, double(&v1)[3], double &averageD) |
| Interpolates the plane through the given points. More... | |
| template<typename T > | |
| void | planeFromPoints (std::vector< T > &points, double(&v1)[3], double(&v2)[3], double(&v3)[3], double &averageD) |
| Interpolates the plane through the given points. More... | |
| double | angleBetweenPlanes (double a1, double b1, double c1, double a2, double b2, double c2) |
| Calculates the angle between two planes ( ). More... | |
| double | angleBetweenPlanes (double n1[3], double n2[3]) |
| Calculates the angle between two planes given by normal vectors. More... | |
| double | dot (double ax, double ay, double az, double bx, double by, double bz) |
| Calculates the dot product of two vectors. More... | |
| void | cross (double(&a)[3], double(&b)[3], double(&result)[3]) |
| Calculates the cross product of two vectors. More... | |
| void | normalize (double(&vec)[3]) |
| Normalizes the given vector. More... | |
| template<typename T > | |
| void | rotatePointsToLocal (std::vector< T > &points, double(&locx)[3], double(&locy)[3]) |
| Rotates points in the local coordinate system (z = 0). More... | |
| template<typename T > | |
| void | rotatePoint (T &pt, double(&v1)[3], double(&v2)[3], double(&v3)[3]) |
| Rotates point in the local coordinate system given by its base vectors. More... | |
| template<typename T > | |
| void | rotatePoints (std::vector< T > &points, double(&v1)[3], double(&v2)[3], double(&v3)[3]) |
| Rotates points in the local coordinate system given by its base vectors. More... | |
| template<typename T > | |
| void | moveCSorigin (std::vector< T > &points, T O) |
| Recalculates the coordinates of the points when the new origin of the coordinate system is set. More... | |
| template<typename T > | |
| void | moveBackCSorigin (std::vector< T > &points, T O) |
| Recalculates the coordinates of the points when the origin of the coordinate system is reset from the given O to (0, 0, 0). More... | |
| template<typename T > | |
| void | giveLocalCS (std::vector< T > &points, double(&locx)[3], double(&locy)[3], double(&locz)[3]) |
| Calculates local coordinate system of the plane defined by the given points. More... | |
| void | giveLtoGVectorsFromLocalCS (double(&locx)[3], double(&locy)[3], double(&locz)[3], double(&l2g1)[3], double(&l2g2)[3], double(&l2g3)[3]) |
| Calculates the global-to-local (G2L) transformation vectors to local-to-global (L2G) transformation vectors. More... | |
| template<typename T > | |
| double | giveAverageCoord (std::vector< T > &points, int cIndex) |
| Calculates the average coordinate of the given points. More... | |
| template<typename T > | |
| void | projectPointsToXYPlane (std::vector< T > &points) |
| Sets the z-coordinate of the given points to the zero. More... | |
Set of functions supporting mathematic operations.
| double angleBetweenPlanes | ( | double | a1, |
| double | b1, | ||
| double | c1, | ||
| double | a2, | ||
| double | b2, | ||
| double | c2 | ||
| ) |
Calculates the angle between two planes ( ).
| a1 | Coefficient a of the first plane |
| b1 | Coefficient b of the first plane |
| c1 | Coefficient c of the first plane |
| a1 | Coefficient a of the second plane |
| b1 | Coefficient b of the second plane |
| c1 | Coefficient c of the second plane |
| double angleBetweenPlanes | ( | double | n1[3], |
| double | n2[3] | ||
| ) |
Calculates the angle between two planes given by normal vectors.
| n1 | Normal vector of the first plane |
| n2 | Normal vector of the second plane |
| void averageD | ( | std::vector< T > & | points, |
| double(&) | v1[3], | ||
| double & | averageD | ||
| ) |
Calculates the average coefficient d for the plane ( ) given by normal vector and interpolated through the given points.
| points | Plane points |
| v1 | Plane normal vector |
| averageD | Return parameter storing the calculated coefficient |
| void cross | ( | double(&) | a[3], |
| double(&) | b[3], | ||
| double(&) | result[3] | ||
| ) |
Calculates the cross product of two vectors.
| a | The first vector |
| b | The second vector |
| result | Return parameter storing the resulting cross product |
| void cubicEq | ( | double | au, |
| double | bu, | ||
| double | cu, | ||
| double | du, | ||
| double(&) | result[3] | ||
| ) |
Calculates the solution of a cubic equation ( ).
| au | Coefficient a |
| bu | Coefficient b |
| cu | Coefficient c |
| du | Coefficient d |
| result | Return parameter storing the calculated solution |
| double det2 | ( | double | a1, |
| double | b1, | ||
| double | c1, | ||
| double | d1 | ||
| ) |
Calculates the determinant of the given 2x2 matrix.
| a1 | Matrix element (1,1) |
| b1 | Matrix element (1,2) |
| c1 | Matrix element (2,1) |
| d1 | Matrix element (2,2) |
| double det3 | ( | double | matrix[3][3] | ) |
Calculates the determinant of the given 3x3 matrix.
| matrix | 3x3 matrix |
| double dot | ( | double | ax, |
| double | ay, | ||
| double | az, | ||
| double | bx, | ||
| double | by, | ||
| double | bz | ||
| ) |
Calculates the dot product of two vectors.
| ax | X component of the first vector |
| ay | Y component of the first vector |
| az | Z component of the first vector |
| bx | X component of the second vector |
| by | Y component of the second vector |
| bz | Z component of the second vector |
| void eig3 | ( | double | matrix[3][3], |
| double | lambda, | ||
| double(&) | result[3] | ||
| ) |
Calculates eigenvector of the given 3x3 matrix for the given eigenvalue.
| matrix | 3x3 matrix |
| lambda | Eigenvalue |
| result | Return parameter storing the calculated eigenvector |
| double giveAverageCoord | ( | std::vector< T > & | points, |
| int | cIndex | ||
| ) |
Calculates the average coordinate of the given points.
| points | The points for calculation of the average coordinate |
| index | Index specifying which coordinate to calculate (0~x, 1~y, 2~z) |
| void giveLocalCS | ( | std::vector< T > & | points, |
| double(&) | locx[3], | ||
| double(&) | locy[3], | ||
| double(&) | locz[3] | ||
| ) |
Calculates local coordinate system of the plane defined by the given points.
| points | Points defining the plane for which to calculate the local coordinate system |
| locx | Return parameter storing local x-axis (in plane, horizontal) |
| locy | Return parameter storing local y-axis (in plane, vertical) |
| locz | Return parameter storing local z-axis (normal vector) |
| void giveLtoGVectorsFromLocalCS | ( | double(&) | locx[3], |
| double(&) | locy[3], | ||
| double(&) | locz[3], | ||
| double(&) | l2g1[3], | ||
| double(&) | l2g2[3], | ||
| double(&) | l2g3[3] | ||
| ) |
Calculates the global-to-local (G2L) transformation vectors to local-to-global (L2G) transformation vectors.
| locx | The first G2L transformation vector |
| locy | The second G2L transformation vector |
| locz | The third G2L transformation vector |
| l2g1 | In-out parameter storing the first L2G transformation vector  |
| l2g1 | In-out parameter storing the second L2G transformation vector  |
| l2g1 | In-out parameter storing the third L2G transformation vector  |
| void moveBackCSorigin | ( | std::vector< T > & | points, |
| T | O | ||
| ) |
Recalculates the coordinates of the points when the origin of the coordinate system is reset from the given O to (0, 0, 0).
| pt | In-Out parameter storing the points to be transformed |
| O | Actual origin coordinates |
| void moveCSorigin | ( | std::vector< T > & | points, |
| T | O | ||
| ) |
Recalculates the coordinates of the points when the new origin of the coordinate system is set.
| pt | In-Out parameter storing the points to be transformed |
| O | New origin coordinates |
| void normalize | ( | double(&) | vec[3] | ) |
Normalizes the given vector.
| vec | In-Out parameter storing the vector to be normalized |
| void planeFromPoints | ( | std::vector< T > & | points, |
| std::vector< int > & | indexes, | ||
| double(&) | v1[3], | ||
| double & | averageD | ||
| ) |
Interpolates the plane through the given points.
| points | Points for the calculation |
| indexes | Indexes specifying which points to use for the plane calculation |
| v1 | Return parametr storing the normal vector of the plane |
| averageD | Coefficient d of the plane equation ( ) |
| void planeFromPoints | ( | std::vector< T > & | points, |
| double(&) | v1[3], | ||
| double(&) | v2[3], | ||
| double(&) | v3[3], | ||
| double & | averageD | ||
| ) |
Interpolates the plane through the given points.
| points | Points through which to interpolate the plane |
| v1 | Return parametr storing the normal vector of the plane |
| v2 | Return parametr storing the first in-plane vector |
| v3 | Return parametr storing the second in-plane vector |
| averageD | Coefficient d of the plane equation ( ) |
| void projectPointsToXYPlane | ( | std::vector< T > & | points | ) |
Sets the z-coordinate of the given points to the zero.
| points | In-Out parameter storing the points to be projected |
| void rotatePoint | ( | T & | pt, |
| double(&) | v1[3], | ||
| double(&) | v2[3], | ||
| double(&) | v3[3] | ||
| ) |
Rotates point in the local coordinate system given by its base vectors.
| pt | In-Out parameter storing the point to be rotated |
| v1 | The first base vector of the local coordinate system |
| v2 | The second base vector of the local coordinate system |
| v3 | The third base vector of the local coordinate system |
| void rotatePoints | ( | std::vector< T > & | points, |
| double(&) | v1[3], | ||
| double(&) | v2[3], | ||
| double(&) | v3[3] | ||
| ) |
Rotates points in the local coordinate system given by its base vectors.
| pt | In-Out parameter storing the points to be rotated |
| v1 | The first base vector of the local coordinate system |
| v2 | The second base vector of the local coordinate system |
| v3 | The third base vector of the local coordinate system |
| void rotatePointsToLocal | ( | std::vector< T > & | points, |
| double(&) | locx[3], | ||
| double(&) | locy[3] | ||
| ) |
Rotates points in the local coordinate system (z = 0).
| points | In-Out parameter storing the points to be rotated |
| locx | Local x vector |
| locy | Local y vector |
 1.8.11
1.8.11

