User Tools
This is an old revision of the document!
Table of Contents
Welcome to PointCloud2BIM
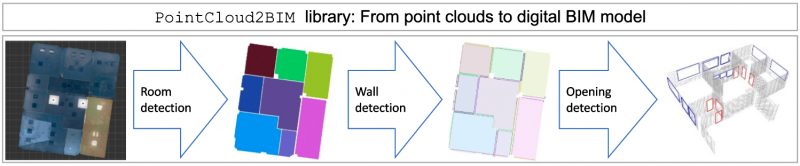
The PointCloud2BIM library provides a set of algorithms to facilitate the processing of 3D Laser scans of buildings (Point Clouds) and identification of fundamental entities, such as floors, rooms, walls and openings.
About
The 3D laser scanning is a convenient and accessible technology to document the existing infrastructure including buildings. The output is set of data points in space, so called point clouds. While point clouds can be directly rendered and inspected, they need to be converted into BIM representation for efficient digital processing. The PointCloud2BIM aims to automate this transformation to a large extend by providing a set of tools and algorithms for this purpose.
The PointCloud2BIM library is written in C++. It can be integrated into any BIM software to assist the conversion of point clouds into digital BIM representation. The library API is documented in the Reference Manual. The library can also be used as a standalone tool without any dependency on BIM software by offering a set of command line tools that can perform the individual steps introduced above. The individual tools operate on top of common database, which stores the original point cloud data as well as the results.
Documentation
Obtaining PointCloud2BIM
The library can be obtained from Department of Mechanics, Faculty of Civil Engineering, Czech Technical University. Please send e-mail to borek.patzak(at)fsv.cvut.cz regarding licensing options.
Authors
Edita Dvořáková, Bořek Patzák, Daniel Rypl and Jan Voříšek
Department of Mechanics, Faculty of Civil Engineering, Czech Technical University in Prague.
Contact: borek.patzak(at)fsv.cvut.cz
Examples
Simple office building, one floor
 |  |  |  |
 |  |
Administrative single floor building with equipment
 |  |  |  |
 |  |
Single floor of a furnished office building – more complex floor
